- EN
- CH



- ЮЌаоЯюФП
- ЛњЦїШЫЮЌаоЗўЮё
- Ъ§ПиЯЕЭГЮЌаоИФдь
- ЫХЗўЧ§ЖЏЦїЮЌао
- ЫХЗўЕчЛњЮЌао
- БфЦЕЦїЮЌао
- ДЅУўЦСЮЌао
- PLCЮЌао
- PCBЕчТЗАхЮЌао
- ПЊЙиЕчдДЮЌао
- ШэЦєЖЏжБСїЕїЫйЦїЮЌао
- ЙЄПиЛњЮЌао
SERVICE ITEMS
ЮЌаоЗўЮёЯюФПPARKING PRODUCTS
ЫХЗўЕчЛњЮЌао,ЫХЗўЧ§ЖЏЦїЮЌао,ДЅУўЦСЮЌао
-
ЗЂВМШеЦкЃК2023-2-10
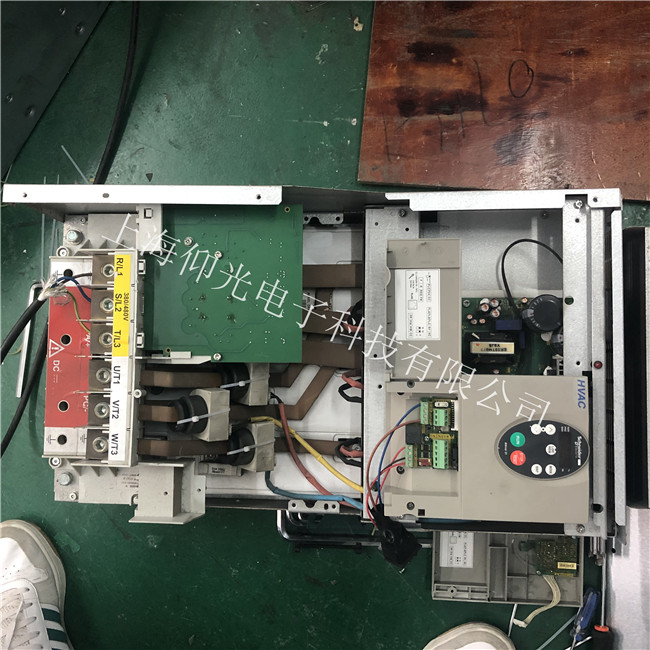
1ЁЂERR4ЃЈЕчдДШБЯрЃЉ ЕчдДЖЫШБЩйвЛЯрЛђжїЕчбЙВЛЦНКтЙ§ДѓЁЃМьВщБфЦЕЦїЕФЕчдДЕчбЙЁЃVLTЙцЖЈЕФЕчдДВЛЦНКтЖШЮЊЖюЖЈЕчбЙЕФЁР2%ЃЈIECБъзМЃЉЁЃЙ§ГЄЪфШыЯпТЗДЋЪфЛђНЛСїНгДЅЦїДЅЕубѕЛЏВЛОљдШЃЌврНЋВњЩњДЫЙЪеЯЁЃ

-
ЗЂВМШеЦкЃК2023-2-10
ПтПЈЛњаЕЪжЫХЗўЕчЛњПедиЕчСїВЛЦНКтЮЌаоЙЪеЯдвђвдМАХХВщ 1ЁЂПтПЈЛњаЕЪжЫХЗўЕчЛњЮЌаоПедиЕчСїВЛЦНКтЙЪеЯдвђ ЂйШЦзщЪзЮВЖЫНгДэЃЛ ЂкЕчдДЕчбЙВЛЦНКтЃЛ ЂлШЦзщДцдкдбМфЖЬТЗЁЂЯпШІЗДНгЕШЙЪеЯЁЃ 2ЁЂПтПЈЛњаЕЪжЫХЗўЕчЛњЮЌаоПедиЕчСїВЛЦНКтЙЪеЯХХГ§ ЂйМьВщВЂОРе§ЃЛ ЂкВтСПЕчдДЕчбЙЃЌЩшЗЈЯћГ§ВЛЦНКтЃЛ

-
ЗЂВМШеЦкЃК2023-2-10
ПтПЈЛњЦїШЫЫХЗўЕчЛњЮЌаожаЖЯжсдвђвдМАЙЪеЯХХВщЃК 1ЁЂПтПЈЛњЦїШЫЫХЗўЕчЛњЮЌаоЙЪеЯдвђ ЂйЛњаЕЩшМЦВЛКЯРэЕМжТОЖЯђИКдиСІЙ§ДѓЃЛ ЂкИКдиЖЫПЈЫРЛђепбЯжиЕФЫВМфЙ§диЃЛ ЂлKUKAЛњЦїШЫЫХЗўЕчЛњКЭМѕЫйЛњзАХфЪБВЛЭЌаФЃЛ 2ЁЂПтПЈЛњЦїШЫЫХЗўЕчЛњЙЪеЯХХГ§ ЂйКЫЖдПтПЈЛњЦїШЫЫХЗўЕчЛњбљБОжаПЩГаЪмЕФзюДѓОЖЯђИКдиСІЃЌИФНјЛњаЕЩшМЦЃЛ
-
ЗЂВМШеЦкЃК2023-2-10
ПтПЈЛњЦїШЫЫХЗўЕчЛњЮЌаоЃЌkukaЫХЗўЕчЛњПЩЪЙПижЦЫйЖШЃЌЮЛжУОЋЖШЗЧГЃзМШЗЃЌПЩвдНЋЕчбЙаХКХзЊЛЏЮЊзЊОиКЭзЊЫйвдЧ§ЖЏПижЦЖдЯѓЁЃKUKAЫХЗўЕчЛњзЊзгзЊЫйЪмЪфШыаХКХПижЦЃЌВЂФмПьЫйЗДгІЃЌдкздЖЏПижЦЯЕЭГжаЃЌгУзїжДаадЊМўЃЌЧвОпгаЛњЕчЪБМфГЃЪ§аЁЁЂЯпадЖШИпЁЂЪМЖЏЕчбЙЕШЬиадЃЌПЩАбЫљЪеЕНЕФЕчаХКХзЊЛЛГЩЕчЖЏЛњжсЩЯЕФНЧЮЛвЦЛђНЧЫйЖШЪфГіЁЃЗжЮЊжБСїКЭНЛСїЫХЗўЕчЖЏЛњСНДѓРрЃЌЦфжївЊЬиЕуЪЧЃЌЕБаХКХЕчбЙЮЊСуЪБЮоздзЊЯжЯѓЃЌзЊЫйЫцзХзЊОиЕФдіМгЖјдШЫйЯТНЕЁЃ
-
ЗЂВМШеЦкЃК2023-2-10
ПтПЈЛњЦїШЫЫХЗўЕчЛњЮЌаоГЃМћЙЪеЯДІРэММЧЩШчЯТЃК вЛЁЂПтПЈЛњЦїШЫЫХЗўЕчЛњЮЌаоДмЖЏЯжЯѓ дкНјИјЪБГіЯжДмЖЏЯжЯѓЃЌВтЫйаХКХВЛЮШЖЈЃЌШчБрТыЦїгаСбЮЦЃЛНгЯпЖЫзгНгДЅВЛСМЃЌШчТнЖЄЫЩЖЏЕШЃЛЕБДмЖЏЗЂЩњдкгЩе§ЗНЯђдЫЖЏгыЗДЗНЯђдЫЖЏЕФЛЛЯђЫВМфЪБЃЌвЛАуЪЧгЩгкНјИјДЋЖЏСДЕФЗДЯђЮЪЯЖЛђЫХЗўЧ§ЖЏдівцЙ§ДѓЫљжТЃЛ

-
ЗЂВМШеЦкЃК2023-2-10
ПЦЖћФІИљЫХЗўЕчЛњЙ§ШШЮЌаоЙЪеЯЖЬЪБМфЕФгАЯьПЩФмВЛДѓЃЌШчЙћЪБМфГЄЕФЛАЃЌЛсЖдЫХЗўЕчЛњдьГЩбЯжиЕФЫ№ЩЫЁЃПЦЖћФІИљЫХЗўЕчЛњЙ§ШШЕФдвђгаКмЖрЁЃЖЬЪБМфЖдЛњЦїЕФадФмУЛгаУїЯдЕФгАЯьЁЃШЛЖјЃЌШчЙћаЙТЉБфЕУЬЋЧПСвЃЌЫХЗўЕчЛњЙ§ШШЕФЙЪеЯМИКѕЪЧВЛПЩБмУтЕФЁЃ
-
ЗЂВМШеЦкЃК2023-2-9
1. ЕчГиЗХЕчЛђЙЪеЯ ЕБФњЕФЪЉФЭЕТБфЦЕЦїВЛЙЄзїЪБЃЌЙЪеЯПЩФмИљБОВЛдкгкЪЉФЭЕТБфЦЕЦїЁЃЮЪЬтвВПЩФмгыЕчГигаЙиЃЌЬиБ№ЪЧШчЙћФњГЄЪБМфдЫааЫќЁЃЕчГиПЩФмвбБЛЯїШѕВЂПьЫйЗХЕчЃЌЛђепФкВППЩФмДцдкЙЪеЯЁЃ
CONTACT US
-

13818985443 ЖЮЙЄ
-

-

ЩЯКЃЪаМЮЖЈЧјВЉдАТЗ858КХ531-532
